2018年7月9日
1. はじめに
本稿では、Society 5.0 においても重要な要素である自動車の自動運転(自動走行)に関して、現状および今後の発展の見通し、その動きに合わせた日本政府の取り組みについて解説します。
2. 自動運転の現状
2.1. Society 5.0 における位置付け
本コラムの第2回でも示しましたが、「未来投資戦略2017」における「Society 5.0に向けた戦略分野への集中投資」の対象である八つの戦略分野の一つとして「移動サービスの高度化、『移動弱者』の解消、物流革命の実現」が位置付けられています。これは無人自動走行技術の進化が前提となっており、政府はその実現のために技術開発、制度整備に取り組む姿勢を示しています。2018年6月15日には、「未来投資戦略2018」が閣議決定されましたが、「変革の牽引力となる『フラッグシップ・プロジェクト』の筆頭に「『自動化』:次世代モビリティ・システムの構築プロジェクト」が掲げられており、「Society 5.0」実現のための重点分野となっています。
政府の高度情報通信ネットワーク社会推進戦略本部(IT総合戦略本部)が2014年から毎年発行している「官民ITS※1構想・ロードマップ」では、ITS・自動運転の実現によりめざす社会、産業目標を次のように定義しています。
今後10 年~20 年程度先を見据えた場合、ITS を巡っては、自動運転システムを中心とする大きなイノベーションが見込まれることを踏まえ、産業面、社会面の両方の観点から、以下の2つの社会を構築することを目標とし、これらの目標の達成にも併せて取り組むこととする。
- 社会面:我が国は、2020 年までに「世界一安全な道路交通社会」を構築するとともに、その後、自動運転システムの開発・普及及びデータ基盤の整備を図ることにより、2030 年までに「世界一安全で円滑な道路交通社会」を構築・維持することを目指す。
- 産業面:我が国は、官民の連携により、ITS に係る車両・インフラの輸出を拡大し、2020 年以降、自動運転システム化(データ基盤の整備を含む)に係るイノベーションに関し、世界の中心地となることを目指す。
(中略)
<自動運転システムに係る基本的戦略>
「自動運転システム」については、2020 年までの高速道路での準自動パイロットの市場化及び無人自動運転移動サービスの実現を図ることにより、2020 年までに世界最先端のITS を構築する。
- 出典:「官民 ITS 構想・ロードマップ2018」
(平成30年6月15日 高度情報通信ネットワーク社会推進戦略本部・官民データ活用推進戦略会議)より抜粋
このように2020年を最初の大きなマイルストーンとして、自動運転システムおよびデータ基盤の整備を進めることで、世界における自動運転の中心となることをめざしています。この「官民ITS構想・ロードマップ」では、自動走行技術を利用した各種サービスを実現するまでのロードマップを示していますが、政策と民間企業の努力がうまくかみ合えば、最も早いものでは、2020年には、ルートが固定された限定領域ではあるものの自動運転車両による最初のサービスが体験できると見込まれます。
- ※1
- Intelligent Transport Systems:高度道路交通システム
道路交通の安全性、輸送効率、快適性の向上等を目的に、最先端の情報通信技術等を用いて、人と道路と車両とを一体のシステムとして構築する新しい道路交通システムの総称
出典:「官民 ITS 構想・ロードマップ2017 ~多様な高度自動運転システムの社会実装に向けて~」(平成29年5月30日 高度情報通信ネットワーク社会推進戦略本部・官民データ活用推進戦略会議)」より抜粋
2.2. 自動運転の仕組み
そもそも自動運転とはどのような仕組みなのでしょうか。基本的には、これまで運転者(人間)が目視していた道路の車線、道路標識、信号、周囲の車両、歩行者等を自動走行車両のカメラ、レーダー等が認知し、運転者の代わりにAIが判断した安全な走行ルートに基づき、自律的に発信、加速、操だ、減速、停止を行うことで、走行する仕組みです。
図1 自動走行のイメージ
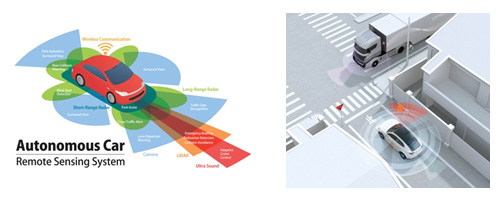
ただし、走行に必要な情報すべてをカメラ、レーダー等で認知し、それだけを基に判断することは、AIにとっても負荷が大きく非効率です。そのため、現在のカーナビゲーション・システムで利用している地図よりも精細な、車線レベルまでの情報を持つ、高精度三次元地図*を受信し、自車の位置を高精度な衛星測位システムの「準天頂衛星」で特定することにより、自動運転の補助とします。また、信号機の情報、道路の規制情報に関しても、高精度三次元地図と併せて送信するなどの方法が研究・開発されています。
図2 自動運転を実現する構成要素と主な開発企業
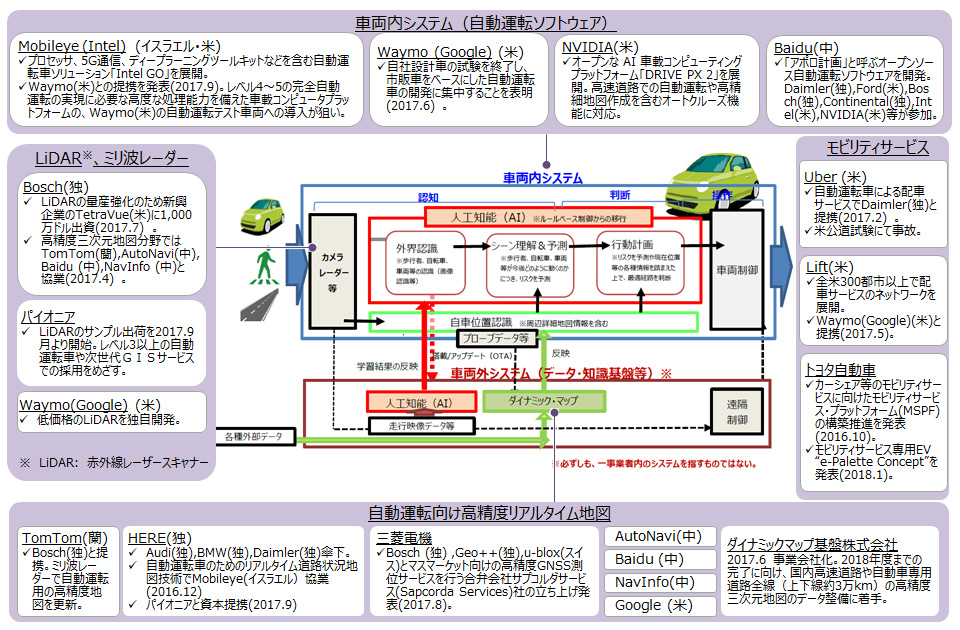
画像を拡大する
資料:「官民 ITS 構想・ロードマップ2018」
(平成30年6月15日 高度情報通信ネットワーク社会推進戦略本部・官民データ活用推進戦略会議)
を基に日立コンサルティングが作成
この自動運転実現への取り組みが可能となったのは、AIの進化によりカメラ、レーダー等から得られた外部の情報を高速で画像処理、認知できるようになったこと、そして複雑な交通環境下でほかの自動車、歩行者等との衝突を防ぐための判断能力をディープラーニング等の技術で磨くことができるようになったことが大きいといえます。
もともとはPC向けのGPU(Graphics Processing Unit)、グラフィックボードの主要メーカーであったNVIDIAが、自動運転システムにおいても主要企業となり、プラットフォームを提供しているのが象徴的です。
2.3. 現在の自動運転技術開発の状況
自動運転に関する多くの記事が発信されていますが、残念ながらその中には事故のニュースも含まれています。現在、どこまで技術開発が進んでいるのでしょうか。
自動運転の技術深度を示すものとして、SAE Internationalという団体が示しているSAE(Society of Automotive Engineers)レベルというものがあります。これは、運転者が自動車を運転する状態をレベル0、どのような環境でも運転者に代わりシステムが運転を行う状態をレベル5とした、6段階の指標です。
表1 自動運転レベルの定義(SAE J3016) 概要
| レベル | 定義 | ||||
|---|---|---|---|---|---|
| 概要 | 安全運転に係る監視、対応主体 | 領域の限定 | |||
| SAE レベル0 |
運転自動化 なし |
運転者がすべてあるいは一部の運転タスクを実施 | 運転者がすべての運転タスクを実施 | 運転者 | - |
| SAE レベル1 |
運転支援 | システムが前後・左右のいずれかの車両制御に係る運転タスクのサブタスクを実施 | |||
| SAE レベル2 |
部分運転 自動化 |
システムが前後・左右の両方の車両制御に係る運転タスクのサブタスクを実施 | |||
| SAE レベル3 |
条件付き 運転自動化 |
システムがすべての運転タスクを実施 | 作動継続が困難な場合の運転者は、システムの介入要求等に対して、適切に応答することが期待される | システム (作動継続が困難な場合は運転者) |
限定領域内 |
| SAE レベル4 |
高度運転 自動化 |
作動継続が困難な場合、利用者が応答することは期待されない | システム | ||
| SAE レベル5 |
完全運転 自動化 |
限定領域内 ではない |
|||
資料:「官民 ITS 構想・ロードマップ2018」
(平成30年6月15日 高度情報通信ネットワーク社会推進戦略本部・官民データ活用推進戦略会議)
を基に日立コンサルティングが作成
・日本の市販車はSAEレベル1~2相当
障害物を検知して自動でブレーキをかける「自動ブレーキ」を搭載した市販の車両が増えていますが、これはSAEレベル1に該当します。このブレーキ制御に加え、ハンドル操作までシステムが支援してくれるステアリングアシスト付きの車両も市販されています(日産自動車 SERENA\セレナ等)。これはSAEレベル2に相当します。これはあくまで運転手が主体のもと、システムが運転支援を行う形態です。
ここからSAEレベル3、4に進むためには、原則的にシステムがすべての運転タスクを実施する必要があります。技術的な課題だけでなく、自動走行車両が事故を起こした場合の責任主体、自動車に運転手が搭乗していることを条件とした法律など、社会的な課題もクリアする必要があります。
・実証実験はSAEレベル4相当を目標として進行
一方で、SAEレベル4相当の自動運転を目標とした実証実験が世界で進められています。
日本では主に政府(国土交通省、経済産業省)主導の下、官民が一体となって取り組んでいます。 2014年からSIP※2の枠組みで研究が進められてきましたが、2017年末頃からは公道での実証実験も含め、多くの実験が全国各地で行われています。
表2 2017年末より日本で実施または実施予定の主な自動運転実証実験
| No. | 実施場所 | 参加主体 | 実施時期 | 概要 |
|---|---|---|---|---|
| 1 | 沖縄 | SBドライブ、 先進モビリティ |
2017/11 |
|
| 2 | 滋賀県 東近江市 |
先進モビリティ | 2017/11 |
|
| 3 | 丸の内 | 三菱地所、 SBドライブ |
2017/12 |
|
| 4 | 東京都 | ZMP、 日の丸交通 |
2017/12 |
|
| 5 | - | トヨタ自動車、 Japan Taxi (日本交通) |
2018/1 |
|
| 6 | 茨城県 常陸太田市 |
パイオニア、 みちのりホールディングス、 茨城交通 |
2018/1 |
|
| 7 | 長野県 伊那市 |
先進モビリティ | 2018/2 |
|
| 8 | 羽田空港周辺 | ANA、 SBドライブ |
2018/2 |
|
| 9 | 神奈川県 | 日産自動車、 DeNA |
2018/3 |
|
資料:新聞記事等を基に日立コンサルティングにて整理
一方、海外では、2015年末の欧州でのバスの実証実験から始まり、米国でも積極的に公道での実証実験が行われていますが、最近では人命にも関わる事故が発生しており、今後の見通しは不透明となっています。
表3 海外の主な自動運転実証実験
| No. | 実施場所 | 参加主体 | 実施時期 | 概要 |
|---|---|---|---|---|
| 1 | スイス シオン市 |
大手バス会社「PostBus」 シオン市 |
2015/11 |
|
| 2 | フィンランド エスポー市 |
デルフト工科大学(蘭)、NVIDIA(米) | 2016/1 |
|
| 3 | 米国 ラスベガス |
Navya(仏) | 2017/1 |
|
| 4 | 米国 | Waymo(Google)(米) | 2018 |
|
| 5 | 米国 | Lyft(米) Aptiv(米) |
2018 |
|
資料:新聞記事等を基に日立コンサルティングが作成
- ※2
- SIP:Cross-ministerial Strategic Innovation Promotion Program(戦略的イノベーション創造プログラム)詳細は当コラム第1回をご参照ください。
3. 自動運転の将来
3.1. 自動運転に関する課題
SAEレベル5の自動走行、すなわち領域を限定せずに全ての公道での自動走行を可能にするためには、まだ多くの課題があります。ここでは、技術面、法律面、倫理面の課題について簡単に整理します。
(1)技術面の課題
技術面では、複雑な交通環境への対応が課題となります。一般道路では信号、標識を正確に把握するだけでなく、駐車車両の陰から飛び出す歩行者への注意、自車以外の車両の急な車線変更等、常に危険を予測しながら運転する必要があります。ここを完全にシステムに委ねるには、米国の事故を踏まえると、まだ技術的な壁があるものと言わざるを得ません。
また、自動運転には前述のとおり高精度三次元地図が必要となりますが、一般道路すべてを網羅するためには相当の時間と費用が必要です。
(2)法律面の課題
法律面の課題は、自動車内に運転者が存在することを前提とした既存の法体系です。日本の道路交通法や道路運送車両法も運転者の存在を前提としているため、これを見直していく必要があります。
【運転者の存在を前提とする法律の例】
(安全運転への義務)
道路交通法第70条 車両等の運転者は、当該車両等のハンドル、ブレーキその他の装置を確実に操作し、かつ、道路、交通及び当該車両等の状況に応じ、他人に危害を及ぼさないような速度と方法で運転しなければならない。
ただし、自動車に関する国際的な条約である「ジュネーブ条約」に批准しているため、この「ジュネーブ条約」と国内法に矛盾が生じないようにする必要があります。そのため、日本からは警察庁が自動運転と国際条約との整合性等についての国際議論に積極的に参加しています。
(3)倫理面の課題(社会受容性)
上記の技術面、法律面の課題をクリアしても、最終的に自動運転車両の安全性に対して、社会から信頼を得る必要があります。特にこれまで人間が行ってきた判断を自動運転システムが行う際には、倫理面でどのような基本ルールに従うべきなのかという点についても議論し、社会的な合意を得る必要があるでしょう。具体的にはトロッコ問題※3などのジレンマです。
ドイツでは2017年8月、交通・デジタルインフラ省が設置した倫理委員会が「自動運転及びコネクテッドカーの倫理規則」というガイドラインを発表しました。そこでも「車が崖沿いの道路を走っている際、その進行方向の路上に複数の子どもたちがいる。まっすぐ進んで子どもたちの命を危険にさらすべきか、崖から落ちてドライバーが自ら命を絶つべきか?」というケースが、「議論の成果と未解決の問題」の中に挙げられています。このガイドラインでは「個人の尊厳と平等の観点から、事故の被害者となるのが、子どもか高齢者か、男性か女性か、などといった点を考慮に入れるのは倫理的に認められない」と一定の見解を示していますが、こうした倫理面の課題を含め、社会が自動運転を許容するまでには時間と議論が必要なのです。
日本でも自動運転の実証実験を各地域で進めていますが、これらの実証実験では自動運転の社会的受容性を高めることも目的の一つとしています。
- ※3
- 英国の哲学者、フィリッパ・ルース・フットが提起した問題。線路を走っていたトロッコが制御不能になった。このトロッコが走行する線路の前方には5人の作業者がいたが、このままでは猛スピードのトロッコを避けることができず、全員がひかれて死んでしまう。このとき偶然、線路の分岐器のそばにA氏がいた。A氏が分岐器を操作して線路を切り替え、トロッコの進路を変えれば、5人を確実に助けることができる。しかし切り替えた先の線路上にも1人の作業者がいる。A氏が分岐器を操作すべきか否かという「5人を助けるために1人を犠牲にしてもよいかどうか」という倫理学の思考実験。
3.2. 日本における自動運転の将来像
(1)日本では限定領域での自動運転サービスが先に実現
前述のような公道走行の課題を踏まえ、日本では二つのアプローチで研究開発が進められています。一つが図3の①で、対応可能な領域を絞ってSAEレベル4相当の自動運転をめざすアプローチ、もう一つが同じく図3の②で、領域を限定せず、全ての公道での技術レベル向上を段階的に進めていくアプローチです。
現在のロードマップでは①の限定領域での自動運転サービスが先に実現する見込みです。
図3 領域別の自動運転 SAEレベルの概念図
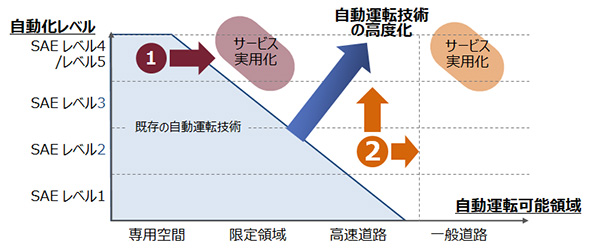
資料:「官民 ITS 構想・ロードマップ2018」
(平成30年6月15日 高度情報通信ネットワーク社会推進戦略本部・官民データ活用推進戦略会議)
を基に日立コンサルティングが作成
(2)2020年に実現する自動運転によるサービス
①のアプローチ、すなわち限定領域におけるSAEレベル4相当の自動運転では、2020年に以下のサービスを実現することが目標とされています。
高速道路のトラック隊列走行
複数台のトラックを縦列で走行する際、後続のトラックは前のトラックに自動追従することで、後続のトラックドライバーの負担を軽減。将来的には無人での走行をめざす技術です。電子けん引とも呼ばれており、一人のドライバーが複数台のトラックを操縦できることから、物流の効率化、トラックドライバーの勤務負荷の軽減が見込まれます。
2018年初頭から新東名高速道路や北関東自動車道の一部の区間で実証実験が始まっています(2018年現在は後続のトラックにもドライバーが乗車)。
限定領域での無人自動運転サービス(ラストマイル)
公共交通機関が発展しておらず、交通量が少ない中山間地域などで、最寄りのバス停等から自宅までのモビリティ(移動)を自動走行車両で担うというものです。自動走行導入の目標である「交通弱者の解消」に直結すること、交通量が少なく、技術的な難易度も比較的低いことから、自動走行車両による旅客/移動サービスの入り口となっています。2017年後半から全国各地で実証実験が行われています。
課題は、利用人口そのものが少ない地域でいかにサービスを事業として成立させるかということ。貨客混載など、さまざまなビジネスモデルが実証実験の中でも検証されています。
次世代都市交通システム(ART※4)
従来のバスをベースとしたBRT※5に自動走行技術を活用します。バス停に正確に横付けする正着制御や新幹線並みのスムーズな加減速制御を実現する技術等でアクセシビリティの向上を図るとともに、公共車両を優先する信号制御システム等の各技術も統合することで安定した定時運行を実現するものです。
2020年の利用を目標に研究開発が進んでおり、パッケージとしての横展開、海外輸出も期待されています。
図4 自動運転システムに係るロードマップ
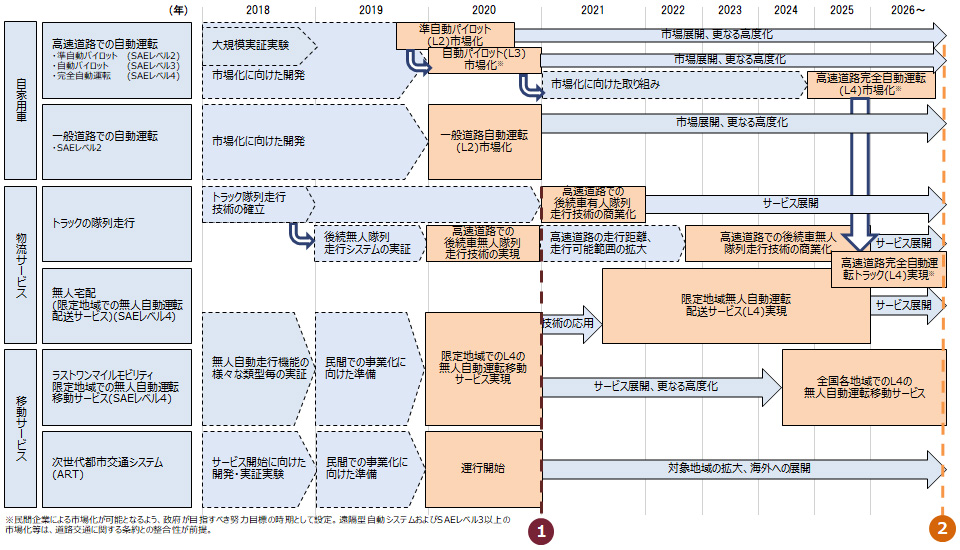
画像を拡大する
※図中①、②は前図3「領域別の自動運転化SAEレベルの概念図」の①、②に対応
出典:「官民 ITS 構想・ロードマップ2018」
(平成30年6月15日 高度情報通信ネットワーク社会推進戦略本部・官民データ活用推進戦略会議)
を基に日立コンサルティングが作成
- ※4
- Advanced Rapid Transit
- ※5
- Bus Rapit Transit
(3)2020年以降
2020年以降は、①の限定領域のサービスは事業化に向けた取り組みが中心となる一方、②のアプローチでは公道での自動走行に向けた取り組みが進められていきます。当面の目標はSAEレベル3の自動運転と、高速道路でのSAEレベル4の自動運転で、特に2018年度に取り組みが始まった次期(第2期)SIPの自動走行分野での課題は、「自動運転に係る激しい国際競争の中で世界に比肩していくため、自動車メーカーの協調領域となる世界最先端のコア技術(信号・プローブ情報※6をはじめとする道路交通情報の収集・配信などに関する技術等)を確立し、一般道で自動走行SAEレベル3を実現するための基盤を構築し、社会実装する。」※7と設定されており、今から5年後の2023年度の一般道で自動運転SAEレベル3に向けた取り組みが加速するものと期待されています。
- ※6
- 実際に自動車が走行した位置や車速などの情報を用いて生成された道路交通情報
- ※7
- 「戦略的イノベーション創造プログラム(SIP)第2 期(平成29 年度補正予算措置分)の実施方針」(平成30年3月29日 総合科学技術・イノベーション会議)
以上
本コラム執筆コンサルタント
神谷 浩史 株式会社 日立コンサルティング マネージャー
「Society 5.0(ソサエティ5.0)」という言葉が世に出て2年あまりが経過しました。
ようやく政府も広報活動に力を入れ、新聞広告を出したり、政府広報オンライン上で『ソサエティ5.0「すぐそこの未来」篇』という動画を公開したりするようになりましたが、世間の認知度はまだまだ低いのではないでしょうか。
Society 5.0は、IoT、AI、ロボットを中心とした先端技術によって社会課題を解決していこうという、日本政府が提唱する科学技術政策の基本指針の一つですが、人類史上5番目の新しい社会(Society)と表現されているとおり、私たちの生活の姿、そして社会の在り方までをも変えうるイノベ-ションによって、今後の日本はもちろん、世界を大きく左右する可能性を秘めています。現在安倍総理が進めている「生産性改革」を実現するための重要なファクタ-の一つでもあり、政府も取り組みに力を入れています。本コラムでは複数回にわたって「Society 5.0」とは何か、世の中をどう変えていくものかを解説していきますが、初回は、改めて「Society 5.0」の概要と、政府の取り組みについて解説します。
※記載内容(所属部署・役職を含む)は制作当時のものです。